AI Agents with n8n
Want to automate tasks in your homelab or explore what AI agents can do? n8n is a free, open-source automation tool that runs perfectly on a Raspberry Pi 5. With it, you can build smart workflows that connect APIs, trigger actions, and even control AI agents like ChatGPT.
What You Can Do with n8n
- Trigger AI responses with webhooks
- Connect apps like Gmail, Telegram, or Google Sheets
- Automate reports, alerts, backups, and file processing
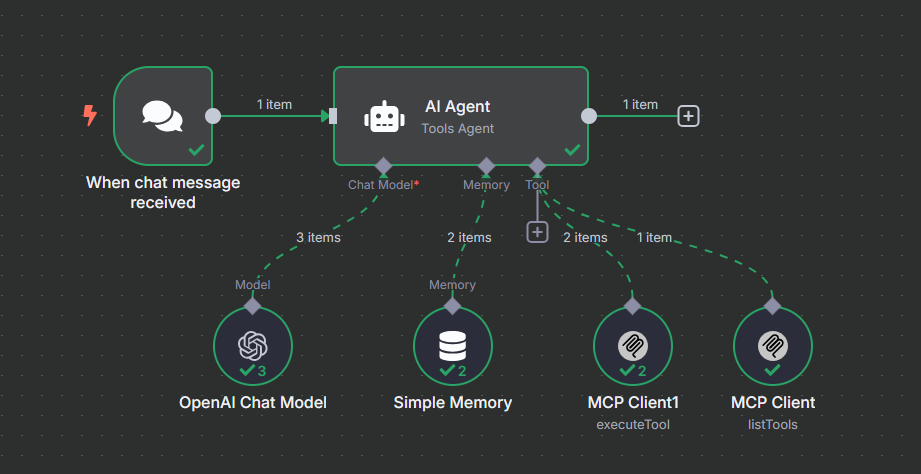
- Build AI workflows that take action on your data
No coding is required, but you can use JavaScript and expressions if you want more control.
Install n8n on Raspberry Pi 5 (with Docker)
1. Install Docker
sudo curl -fsSL https://get.docker.com -o get-docker.sh
sudo sh get-docker.sh
sudo reboot
2. Add User to Docker Group
sudo groupadd docker && sudo usermod -aG docker $USER
sudo reboot
3. (Optional) Install Portainer for GUI Management
docker run -d -p 9000:9000 --name=portainer --restart=always --pull=always \
-v /var/run/docker.sock:/var/run/docker.sock \
-v /data/portainer_data:/data \
portainer/portainer-ee:latest
4. Prepare Data Folders
sudo mkdir -p /data/n8n_data /data/compose/n8n
sudo chmod -R 777 /data
5. Create docker-compose.yml
Save this in /data/compose/n8n/docker-compose.yml:
services:
n8n:
image: n8nio/n8n:latest
restart: always
ports:
- "5678:5678"
environment:
- TZ=Europe/Copenhagen
- N8N_BASIC_AUTH_ACTIVE=true
- N8N_BASIC_AUTH_USER=admin
- N8N_BASIC_AUTH_PASSWORD=xxxxxxxxxxxx
- N8N_HOST=10.168.0.277
- N8N_PORT=5678
- N8N_SECURE_COOKIE=false
volumes:
- /data/n8n_data:/home/node/.n8n
⚠️ Replace the IP address with your Raspberry Pi’s actual IP.
6. Launch n8n
cd /data/compose/n8n
docker compose up -d
Now open your browser:
http://10.168.0.277:5678
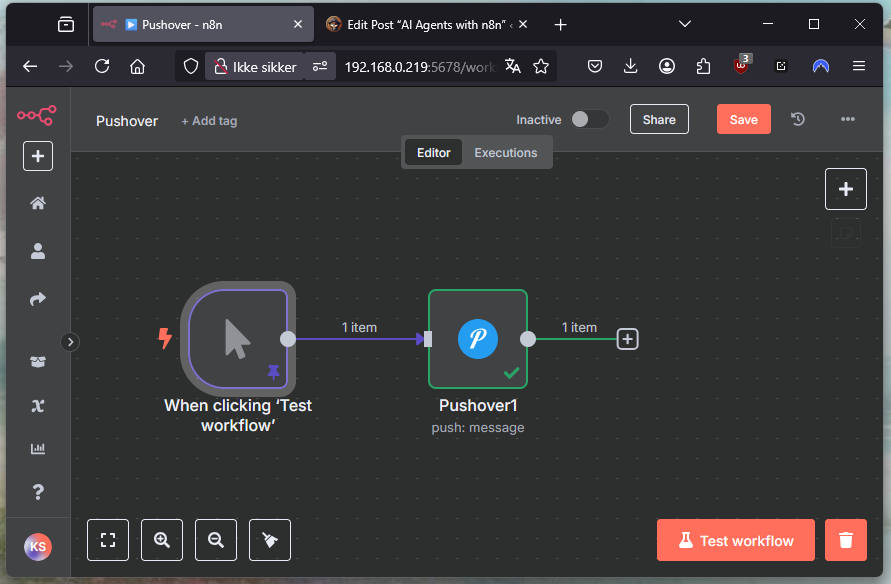
n8n + AI agents = powerful automation. Run it in your homelab and take full control of your workflows.